

Итак, следующий этап - начало сборки всех компонентов дрона. Наконец-то собрался нужный комплект:
1. Моторы Emax 2212, 920 kV (фотка выше).
Моторы по отзывам очень не плохие и, в то же время, не дорогие. Посмотрю как они будут себя вести. Пришли аккуратненько запакованые, каждый в пакетике со всеми винтиками и готовыми к подключению разъёмами типа "bullet banana". Два правого вращения, два левого. Разница между ними только в резьбе для прикручивания винта соответствующего направления вращения. Идея такого крепления мне понравилась т.к. с точки зрения безопасности винты с гайкой будут себя постоянно поджимать (за счёт инерции), не давая открутиться и сорваться.
2. Кабель 18 AWG, 3 ft. (фотка выше)
Кабель нужен для удлинения растояния между мотором и ESC и выбран из расчёта максимальной силы тока на одной линии.
3. ESC BLHeli 30 A (забыл сфоткать в упаковке)
ESC - Электронный контроллер скорости мотора. Выбирал по рейтингу, но, как оказалось потом, ошибся. Нужно было выбирать по типу загрузчика и не скупиться на цену. Теперь думаю, что после контроллера полёта, ESC есть следующая по важности деталь в дроне. Имел проблемы с этими ESC, о которых расскажу в статье ниже.
4. Плата распределения питания (фотка ниже)
Можно было купить простую плату - разводку, но я подумал, что может пригодится дополнительный стабилизатор на 12 и 5 вольт для чего-нибудь ещё на борту дрона. Временно запитаю FPV камеру и трансмиттер. (Я знаю, что для них лучше отдельная батарея)
5. Комплект коннекторов "bullet banana" (фотка ниже)
Коннекторы нужны для быстрого отсоединения силовых проводов в главной мере между двигателем и ESC. Прелесть их в том, что не только можно простым переключением менять направление вращения моторов но и при необходимости (при аварии) можно легко заменить лучи/моторы простым отсоединением.
6. Нейлоновые крепёжные элементы (нет фотки)
Хоть они и "одноразовые", но в них есть одно преимущество: почти ничего не весят. Поэтому, для крепления плат на борту (с учетом, что карбон токопроводящий) - идеальное решение.

Итак, первое, что я сделал - припаял все ESC и BEC (для питания APM) к плате распределения питания, далее, прикинул длину проводов до складывания лучей и припаял коннекторы:

Далее, натянул термокембрик на коннекторы:

Прикрутил плату распределения питания к центру рамы (дырочки для крепления просверлил):

Вот так чудесно нейлоновый крепёж держит плату распределения и дополнительные колонны я подготовил для демпфера APM:

Далее, удлинил провода с моторов (лучи в раме довольно таки длинные):

Прикрутил моторы к площадкам-кронштейнам:

Протянул провада в лучи:

Закрепил лучи на раме и подсоеденил моторы и закрепил регуляторы стяжками:

Рама в раскрытом состоянии:

Рама в сложенном состоянии:

Следующее, что надо сделать - подключить ESC к APM, откалибровать моторы и проверить направление их вращения.
Источник: http://apmcopter.ru/apm/apm-setup/podklyuchenie-motorov-i-regulyatorov.html
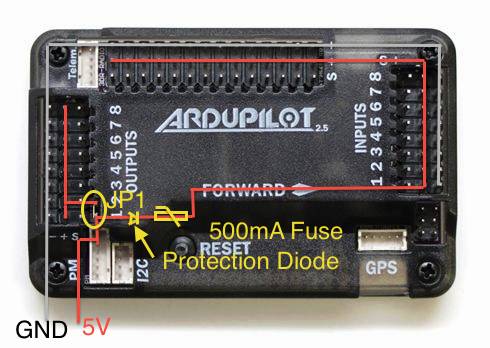
Первое, что я сделал - в соответствии с инструкцией вытащил перемычку JP1, т.к. питание контроллера у меня от специального стабилизатора и нет необходимости питать его дополнительно ещё от ESC.
Кстати, на странице по ссылке выше хорошая иллюстрация пинов по питанию (которая наглядно объясняет почему перемычка не нужна):
Далее, я временно прикрутил APM к раме и подключил к нему 4 трёхжильных кабеля:


ESC к контроллеру подключал в соответствии с номерами на корпусе APM для схемы QUAD-X:
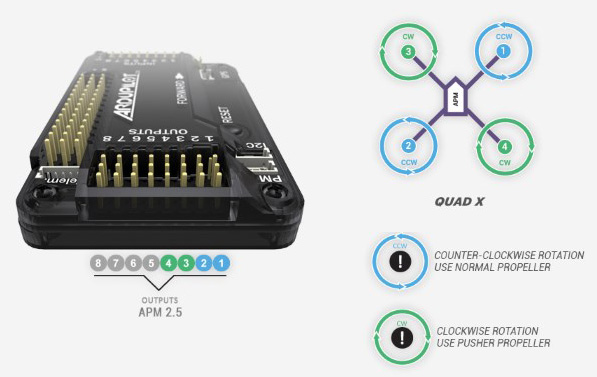
К слову, пришлось поискать инфо в интернете об этих трёхжильных кабелях. При подключении к APM этот трёхжильный кабель можно воткнуть неправильно. На самом корпусе APM почему то не обозначены где сигнальная жила, где "+" и где "-" (потому что у меня APM с боковыми выводами пинов). Пришлось найти в интернете распиновку:
- "Сигнал" - те что ближе к центру платы (значит верхние в моей конфигурации)
- "+" - центральные пины
- "-" - те что с краю платы (значит нижние в моей конфигурации)
Сам же трёхжильный кабель имеет такую раскрасу жил: Оранжевый-Красный-Коричневый. В инструкции к ESC небыло указано какой из них за что отвечает, поэтому ответ отрыл тут:
- Орагжевый - "Сигнал"
- Красный - "+"
- Коричневый - "-"
Калибровку делал согласно инструкции которая шла вместе с ESC. К сожалению, откалибравать BLHeli не получилось. Расскажу об этом подробнее, может кому пригодится.
Согласно инструкции калибровка ESC BLHeli 30A должна быть произведена по такому алгоритму:
- Включаем Приёмник
- Стик газа в максимальное положение
- Подключаем аккумулятор и ждём пока красный, синий и желтый светодиоды не начнут перемигиваться.
- Отключаем аккумулятор.
- Опять подключаем аккумулятор. Теперь контроллеры скорости в режиме калибровки.
- Ждём 2 сигнала. Первый на тон выше, втрой ниже. Контроллеры запомнили верхний уровень газа.
- Далее идёт пауза 2 сек. во время которой нужно стик передвинуть в крайнюю нижнюю позицию.
- Ждём длинный сигнал. Контроллеры запомнили нижний уровень газа.
- Далее идет количество сигналов соответствующее количеству банок последовательно соединённых в аккумуляторк (у меня 3S, значит 3 сигнала)
- Далее играет мелодия, говорящая что калибровка завершена.
- Теперь можно поднять уровень газа чтобы проверить работают ли моторы и в какую сторону они крутятся.
Так вот у меня на п.7. возникала проблема: как только я стик газа опускал в мин. значение... ничего не происходило. Ну и соответственно моторы вообще не крутились.
Я начал рыть в интернете что делать. Вычитал, что можно попробовать второй способ каибровки при котором ESC подключаются к 3-му каналу приёмника калибруется каждый по отдельности. Я попробовал, и у меня получилось - калибровка прошла успешно. Но, как только я опять собрал все компоненты, включил приёмник и подключил аккумулятор к дрону - контроллеры взбесились и выдавали бесконечные пикающие "бипы".
В инструкиции к контроллерам вычитал, что этот сигнал означает неправильное значение сигнала газа при старте. Контроллеры таким образом сообщают об этом и переходят в безопасный режим - отключают моторы.
Продолжил рыть интернет. Наткнулся на ПО от BLHeli (BLHeli Suite), позволяющее напрямую задать параметры мин и макс значения газа. Установил его на ноут, но BLHeli Suite к сожалению не увидел ESC через APM (ни через USB кабель ни через телеметрию).
Продолжил рыть интернет. И вот наконец-то наткнулся на коллег, у которых была 1:1 проблема как у меня, точь в точь симптомы. Хороший человек под ником leonid подсказал в каком направлении рыть (за что ему огромная благодарность, ибо я уже думал другие контроллеры покупать!) - нужно выпаять определённые резистор и конденсатор, и всё заработает. Далее я нашел подробное описание проблемы и фотку в которой указанно, где именно находятся резистор и конденсатор, которые нужно выпаять в моём ESC. Как оказалось, это известная "хардварная" проблема именно с ESC BLHeli 30A.
Ну что ж, пришлось разбирать всё, что я уже аккуратно собрал и привинтил. Я раскрыл изоляцию первого ESC, и выпаял эти 2 элемента:
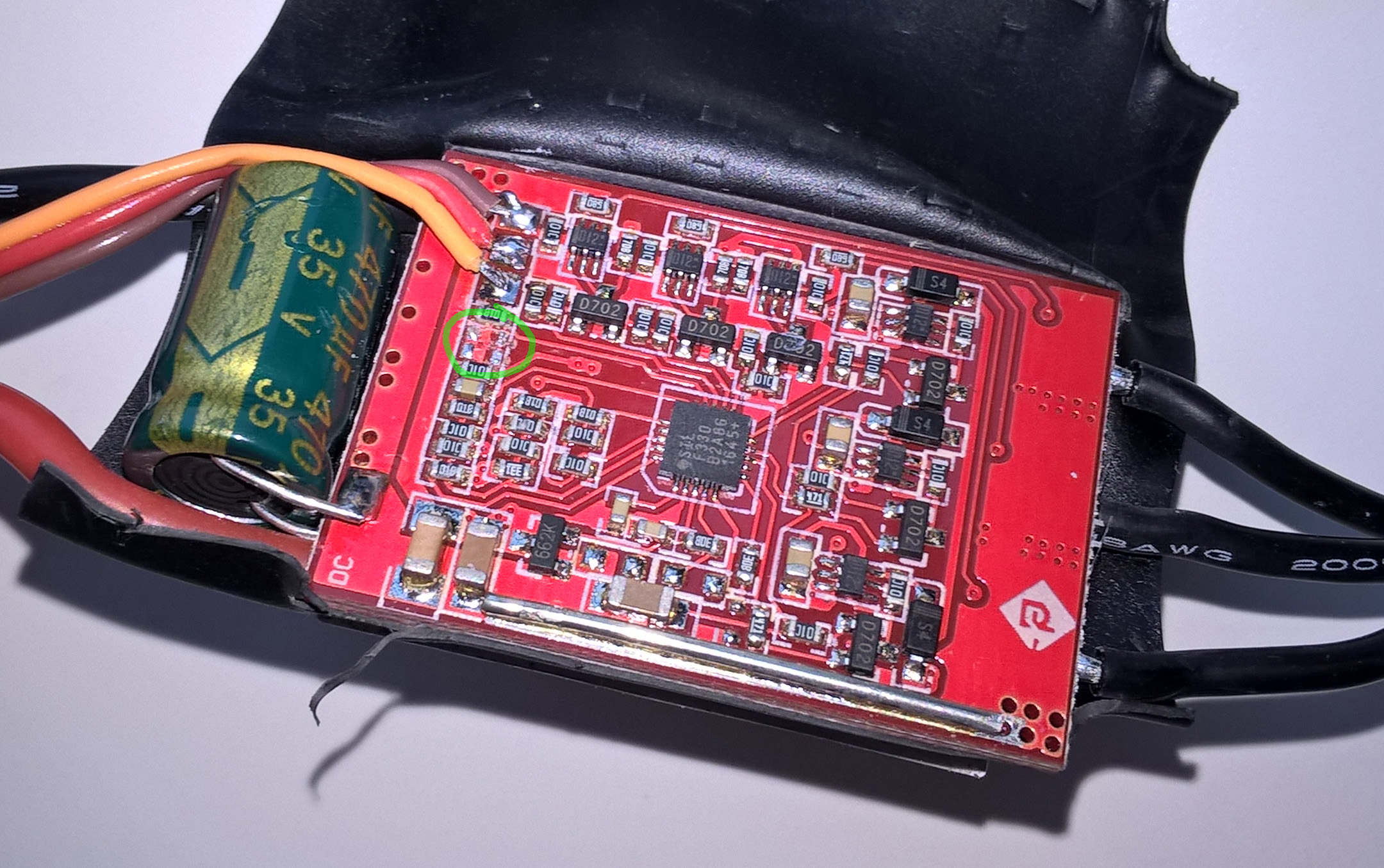
К счастью, у меня был маломощный паяльник с конусным жалом и лупа. Аккуратно выпаять было крайне тяжело - уж очень маленькие элементы на плате.
Как только выпаял оба конденсатор и резистор - акуратненько под лупой проверил контакты и попробовал откалибровать первый ESC.
Я просто не поверил - ESC откалибровался через APM с первой попытки!!!
Далее, я проделал ту же процедуру с остальными ESC (чтобы быть уверенным, что выпаял аккуратно без повреждения платы и дорожек), аккуратно заизолировал их и собрал раму во второй раз.
Последующая калибровка всех 4-х ESC одновременно увенчалась успехом!
И последнее, что сделал - подкорректировал направление вращения 1-го двигателя, путём изменения 2 кабелей из трёх.